Ob in großer Tiefe, bei schlechter Sicht oder unter gefährlichen Bedingungen – viele Lösungen zur Arbeit unter Wasser stoßen schnell an natürliche Grenzen. So sind beispielsweise klassische Tauchgänge zeitlich stark begrenzt und mit erheblichen Risiken verbunden: Tauchende verlieren schnell die Orientierung, die verfügbare Atemluft ist limitiert, und mit zunehmender Tiefe steigen sowohl körperliche Belastung als auch Unfallrisiken deutlich.
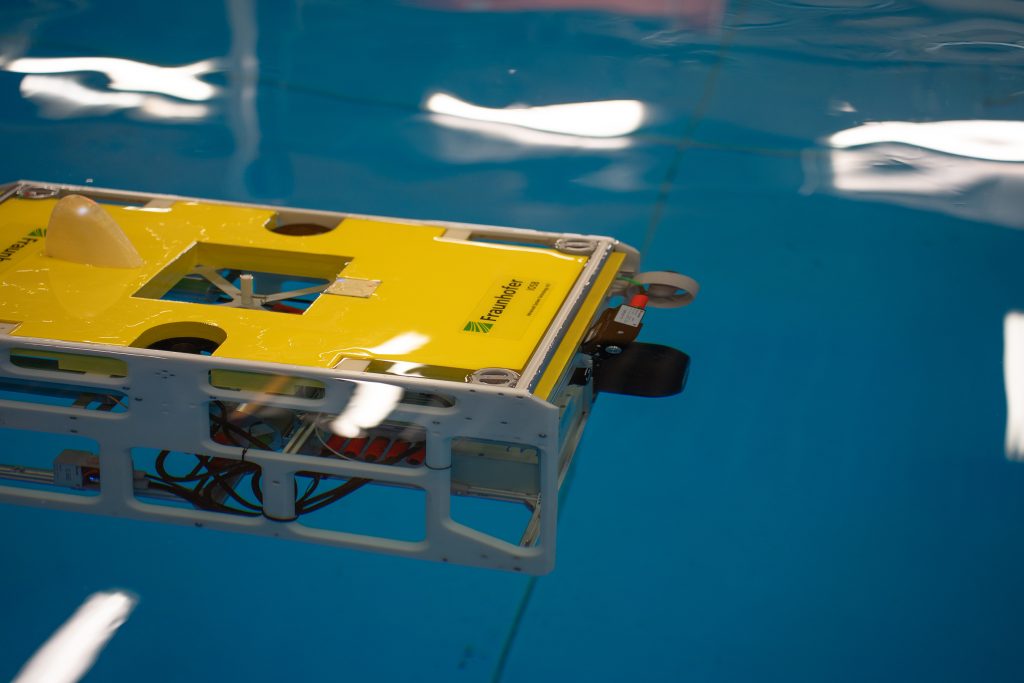
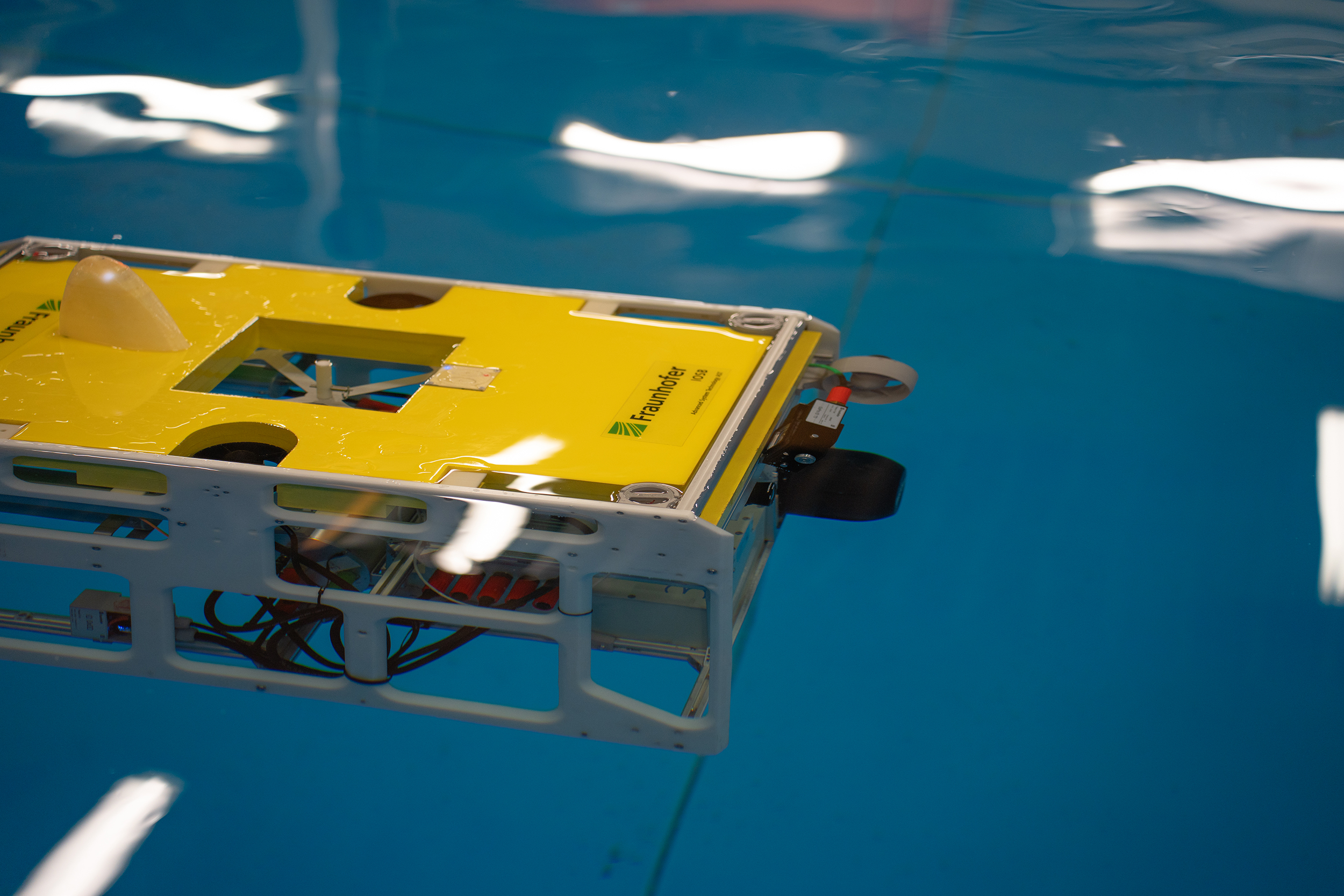
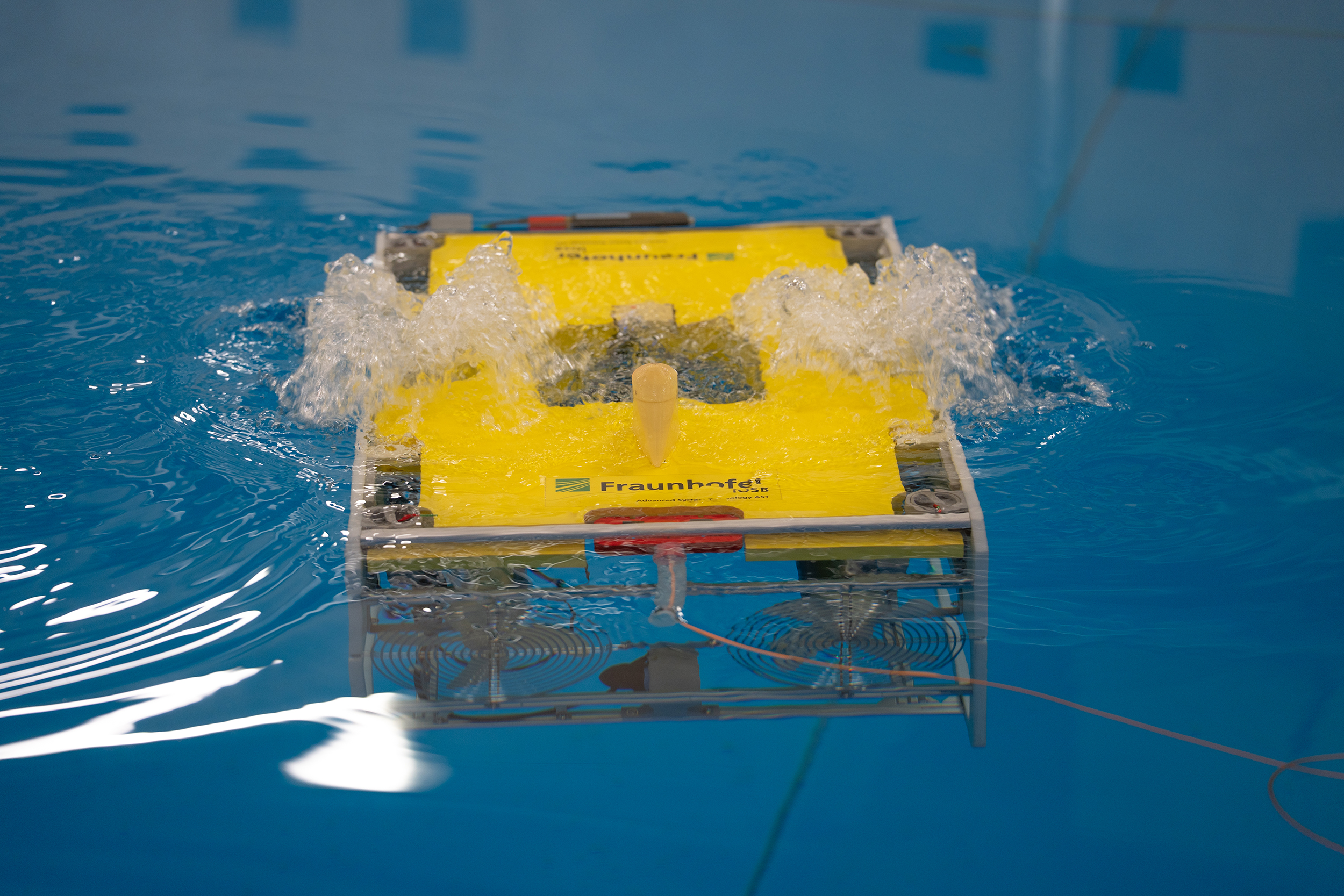
Genau hier kommen die ferngesteuerten Unterwasserfahrzeuge (Remotely Operated Vehicles, ROV) des Fraunhofer IOSB-AST in Ilmenau zum Einsatz. Sie erreichen Bereiche, die für den Menschen nur schwer oder gar nicht zugänglich sind, und schaffen damit neue Möglichkeiten für Forschung, Inspektion, Überwachung und Rettung.
Wo Standardlösungen nicht ausreichen
Standardtechnologien scheitern meist dort, wo eine Kombination aus Tiefe, Dauer, Genauigkeit und Sicherheit gefragt ist. Unter Wasser liegende Bauwerke, technische Anlagen oder schwer zugängliche Einsatzorte erfordern flexible Systeme, die sich an wechselnde Bedingungen anpassen lassen.
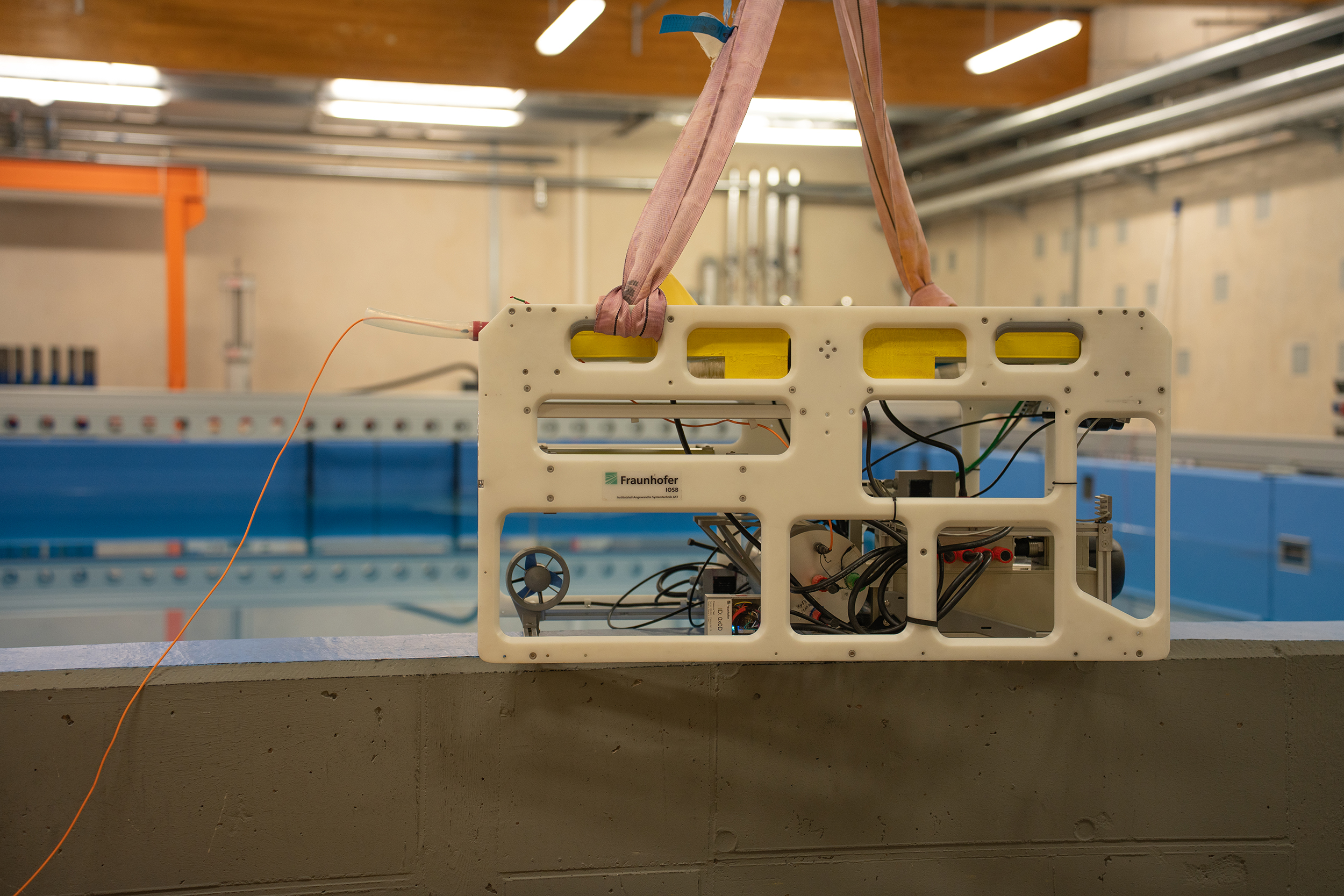
Die ROVs des IOSB-AST können sicher und zuverlässig in Tiefen von bis zu 150 Metern agieren. Sie lassen sich präzise fernsteuern und dank eines integrierten Energiespeichers über längere Zeiträume einsetzen. Leistungsfähige Sensorik, Kameras und die Kommunikation über ein kompaktes Glasfaserkabel ermöglichen eine kontinuierliche Beobachtung – unabhängig von Umweltbedingungen. Dabei liefern ROV unter anderem hochauflösende Bilddaten in Echtzeit.
Eine Besonderheit der Fraunhofer ROV: Aufgerüstet mit der entsprechenden Navigationssensorik lassen sie sich in autonome Unterwasserfahrzeuge (AUV) umwandeln.
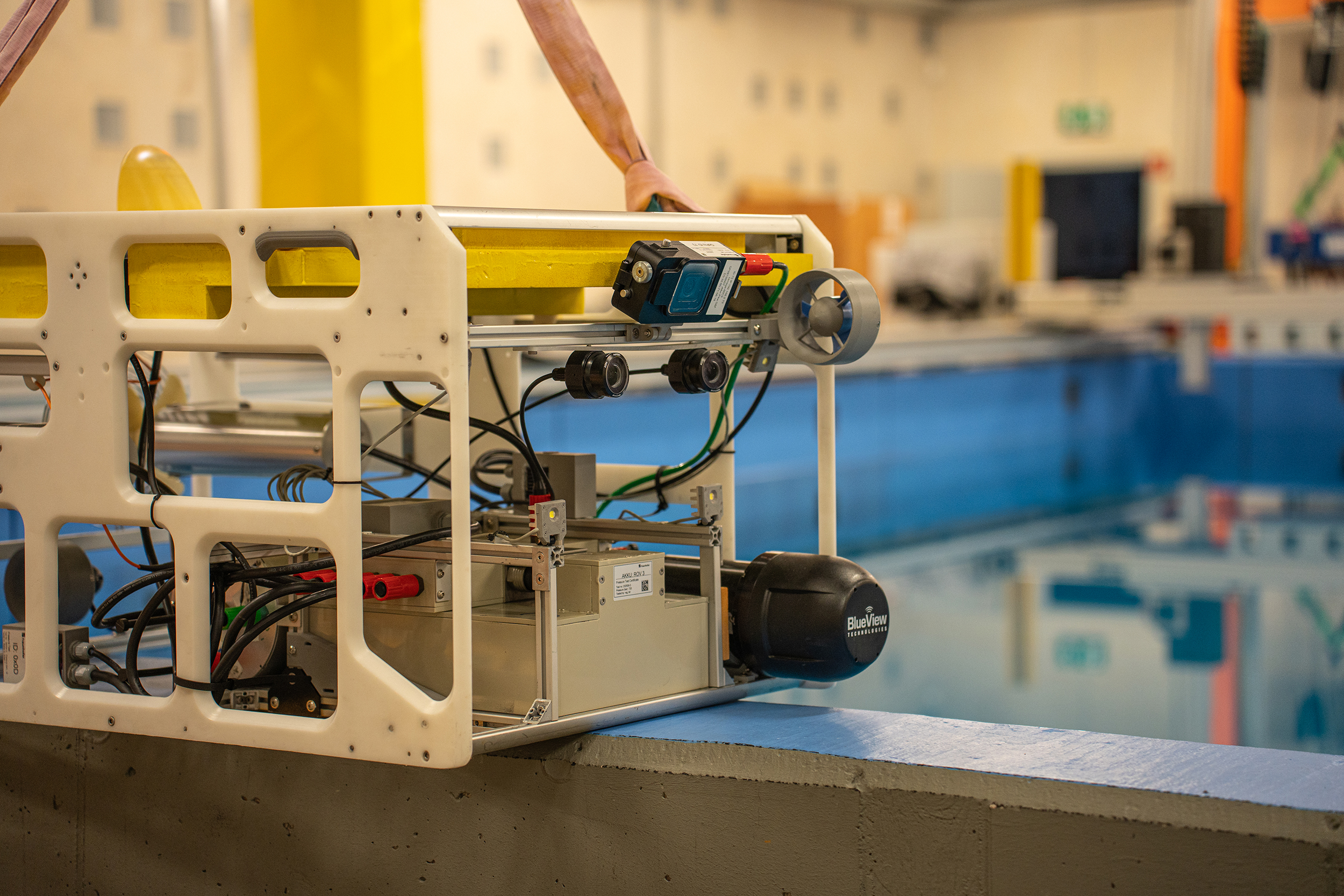
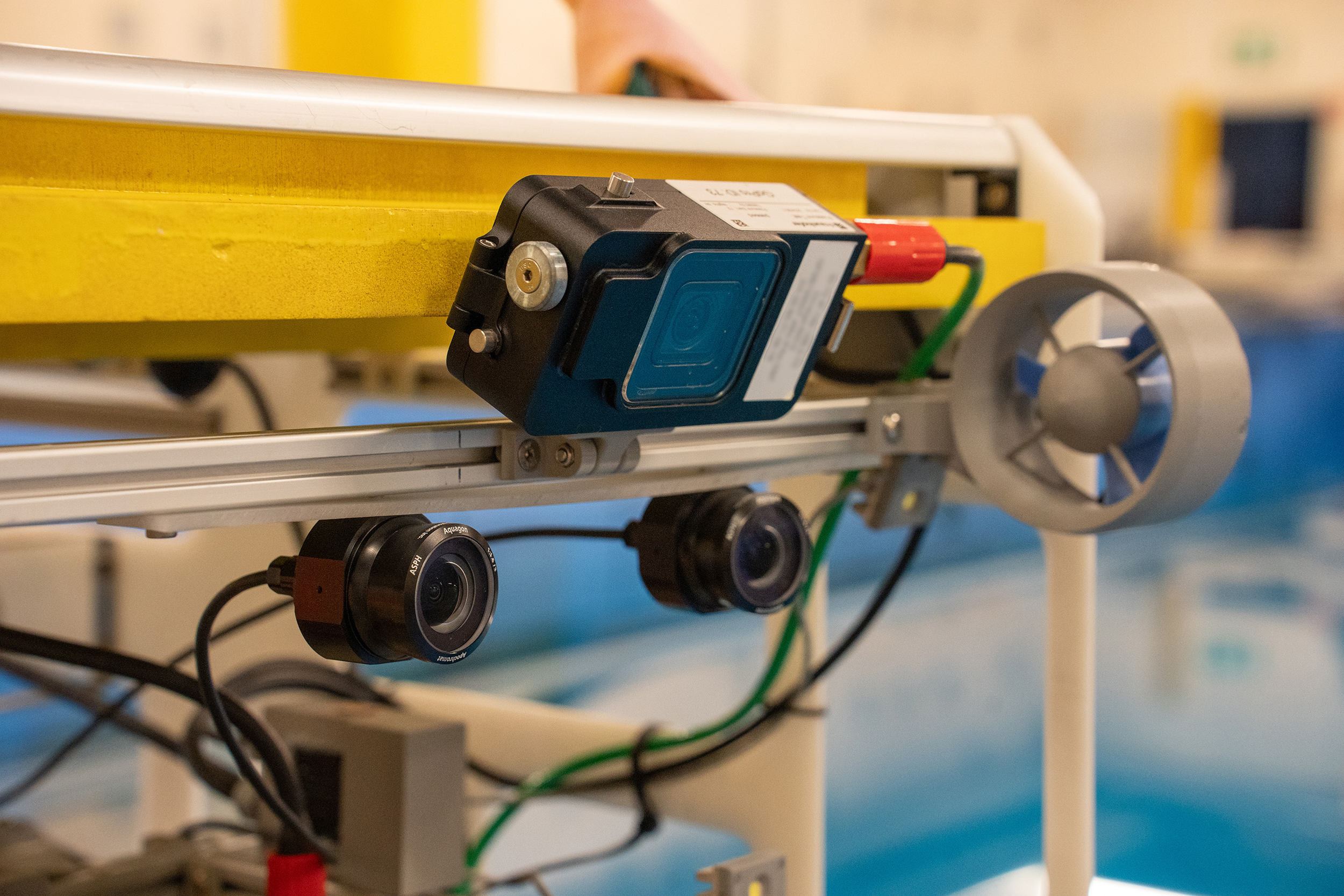
Mit aufgerüsteter Kameratechnik zu besseren Ergebnissen
Dank des internen Innovationsbudgets des Leistungszentrums InSignA wurden nun neue Kameramodule evaluiert. Ziel war es zu prüfen, ob und wie diese kompakten Kameras hinsichtlich Schnittstellen, Energiebedarf, mechanischer Integration und Datendurchsatz in die bestehenden Unterwasserfahrzeuge integrierbar sind.
Um geeignete Einsatzszenarien zu identifizieren, wurden unter Realbedingungen unterschiedliche Bilddatensätze aufgenommen und hinsichtlich Bildqualität, Aufnahmeoptionen, Latenz und Eignung für nachgelagerte Bildverarbeitungsalgorithmen analysiert. Die Ergebnisse fließen in die Systemarchitektur sowie zukünftige Hardware- und Software-Weiterentwicklungen der ROV-Plattformen ein.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Vielfältige Einsatzmöglichkeiten in Forschung und Praxis
Der Einsatzbereich von ROV ist breit gefächert. In der Archäologie ermöglichen sie die schonende Dokumentation von Unterwasserfundstellen, ohne diese zu beschädigen. Betreiber von Staudämmen, Schleusen oder Offshore-Windparks nutzen ROV zur Inspektion kritischer Infrastrukturen und zur frühzeitigen Erkennung von Schäden.
Auch im Bereich der Personenrettung oder bei Such- und Bergungseinsätzen liefern die Fahrzeuge wertvolle Informationen, wenn der Einsatz von Tauchern zu riskant oder zeitlich nicht realisierbar ist. Darüber hinaus eröffnen sie neue Perspektiven für Umweltmonitoring, Gewässerforschung und technische Erprobungen unter realen Bedingungen.
Praxisnahe Forschung im Verbund von InSignA
Als Partner im Leistungszentrum InSignA bringt das Fraunhofer IOSB-AST seine langjährige Expertise in Sensorik, Bildgebung und autonomen Systemen ein. Die ROV sind ein anschauliches Beispiel dafür, wie angewandte Forschung, technologische Weiterentwicklung und gezielte Investitionen ineinandergreifen.
Im Verbund des Leistungszentrums entstehen so Lösungen, die nicht nur wissenschaftliche Fragestellungen adressieren, sondern auch konkrete Herausforderungen aus Wirtschaft, Umwelt und Gesellschaft aufgreifen – dort, wo menschliche Fähigkeiten an physische Grenzen stoßen und technologische Unterstützung den entscheidenden Unterschied macht.